4차 산업혁명 시대에서 인공지능과 더불어 산업시설에서는 로봇을 통한 공장 자동화가 중요한 이슈입니다.
또한 휴게소 곳곳에는 로봇이 커피를 뽑아주고 솜사탕을 만들어줍니다.
이렇게 흔하게 볼 수 있는 협동로봇은 어떤 기계로 이루어져 있을까요?
안녕하세요. 세상의 많은 이야기를 들려드리는 한스토리 입니다.
오늘의 주제는 '협동로봇의 하드웨어 구성' 입니다.
산업용 로봇에 비해 높은 안전성을 가지면서 사람과 함께 일할 수 있다는 개념으로 만들어진 협동로봇은 현재 카페에서 커피를 내려주기도 하고, 치킨을 튀겨주기도 하며, 놀이공원에서는 솜사탕을 만들어 주면서 대중적으로 거리를 좁혀오고 있습니다.
협동 로봇은 어떤 기구적인 장치들로 구성되어 있는지 간략하게 훑어보겠습니다.

1. 협동로봇의 하드웨어 구성
협동로봇(Collaborative Robot)은 줄여서 코봇(Cobot)이라고 부르기도 합니다.
인간과 로봇이 함께 작업할 수 있는 협력성과 안전성에 중점을 둔 설계로 개발되어 있기 때문에 일반 산업용 로봇에 비해 속도는 느리고, 사용자 편의성이 높으면서 다양한 응용분야에 쓰일 수 있다는 장점이 있습니다.
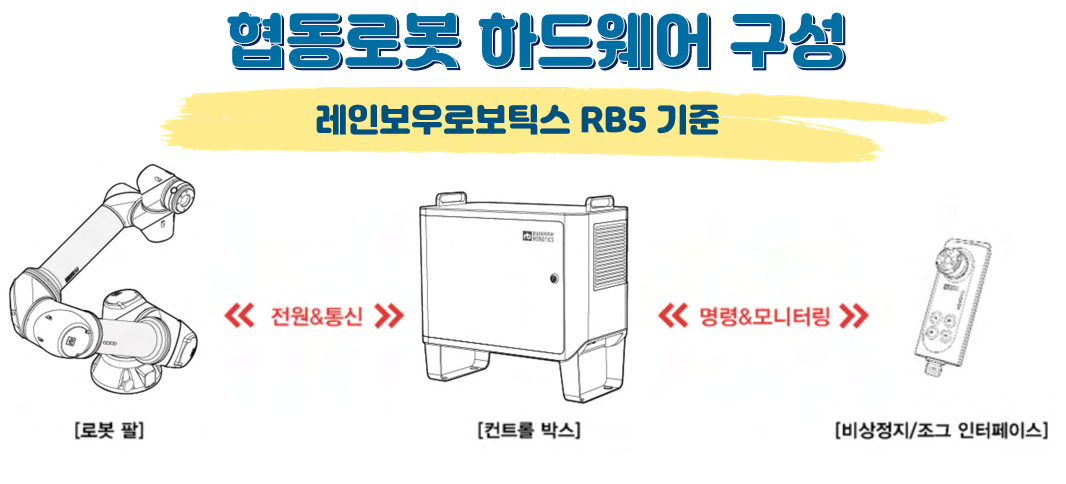
위 사진은 국내에서 협동로봇을 제작하는 업체인 레인보우로보틱스의 RB5라는 협동로봇 모델을 예시로, 협동로봇의 하드웨어 시스템을 나타낸 것입니다.
정말 크게는 로봇 팔과 로봇팔을 제어하는 컨트롤 박스로 나뉠 수 있죠.
로봇 팔 (Robot Arm)
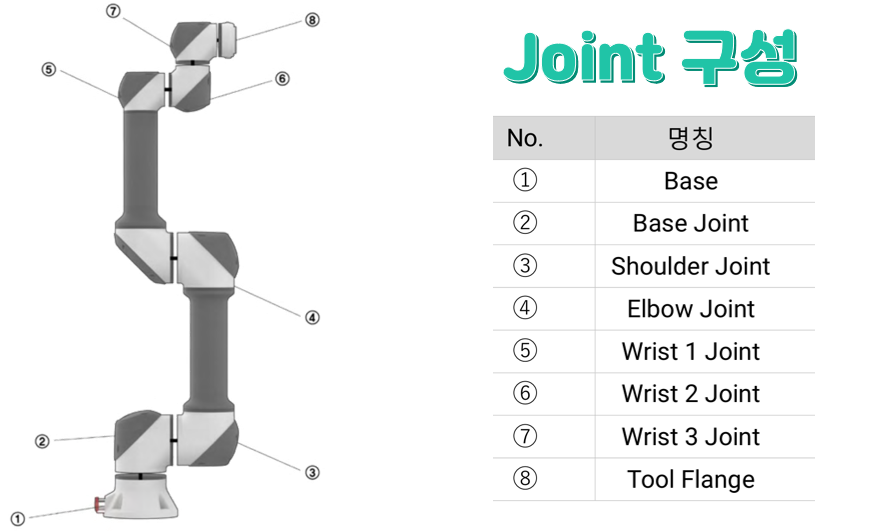
먼저 로봇 팔에는 6개의 조인트(회전 축)가 있습니다.
조인트의 개수는 로봇마다 4개를 사용하기도 하고 6개, 7개를 사용하기도 하는데,
주로 협동로봇에서는 6개의 조인트를 사용합니다.
그 이유는 로봇 팔이 결국 사람의 팔의 움직임을 보면서 움직임에 가장 최적화된 자유도라고 보시면 될 듯 합니다.
Joint 마다 명칭을 따로 붙여놓았는데 2번부터 7번까지가 6개의 회전축이라고 보시면 됩니다.
이 명칭은 로봇 제조회사마다 다르고 저같은 경우는 Joint의 약자 J를 써서 J1~J6으로 부르기도 합니다.
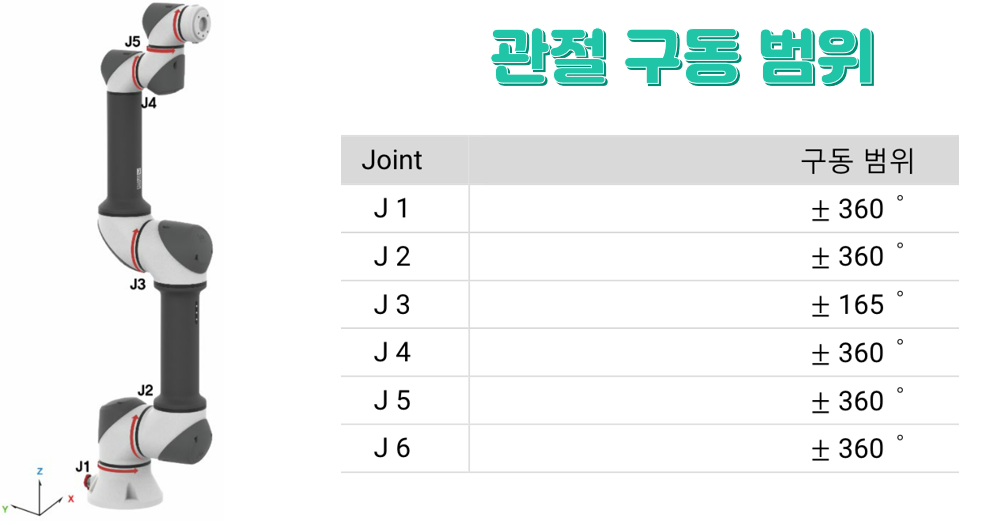

또한 로봇 제조사에서 제공하는 각 관절별 구동 범위가 있습니다.
대부분 360도 회전이라고 적혀있기는 하지만 실제 구동에서 360도를 모두 사용하는 경우는 거의 없는 것 같긴 합니다.
결국 협동로봇을 통해 어떤 동작을 수행할 것인지 목적에 따라 사용하는 구동 범위가 결정이 되겠죠
축 구성에 따른 분류
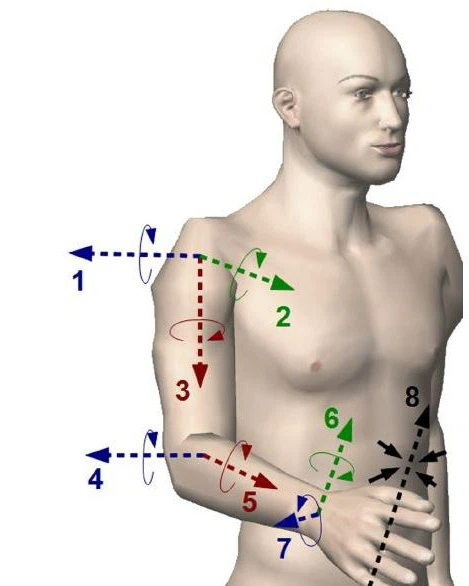
각 Joint는 특정한 축을 기준으로 회전을 합니다.
그리고 우리가 사는 3차원 세계에서는 보통 x,y,z 3개의 축을 기준으로 수학적으로 좌표계를 설정하는데,
각 축을 기준으로 회전을 구분짓기 위해 Pitch, Yaw, Roll 이라는 용어를 사용합니다.
그리고 직선운동을 Translation 이라는 용어를 써서 로봇의 움직임을 나타냅니다.

수직, 수평 직선운동을 translation,
팔꿈치를 기준으로 팔을 위아래로 회전시키는 방향을 Pitch,
지면과 수평한 방향으로 돌아가는 방향을 yaw,
그리고 손목을 시계방향, 반시계방향으로 돌리는 방향을 Roll 회전이라 부릅니다.

그러면 축이 어떻게 구성되어있는지에 따라 로봇을 분류하기도 하는데요,
먼저 x,y방향의 직선운동만 하는 로봇을 직교로봇
그리고 yaw 방향의 회전만 하는 다축 로봇을 SCARA 로봇
여러 회전축을 다양하게 사용하는 로봇 형태를 manipulator 라고 부릅니다.
Manipulator가 우리가 일반적으로 알고있는 협동로봇의 형태입니다.
2. 로봇 내부의 하드웨어 구성
이제 아주 조금만 더 깊이 들어가서,
밖에서 보이지 않는 협동로봇의 내부에는 어떤 것들로 구성되어 있는지 살펴보겠습니다

우선, 각 Joint마다 액츄에이터 모듈이 달려있습니다.
액츄에이터 모듈이라 하면 축을 구동시키기 위한 모터, 감속기.
그리고 회전 위치를 알 기 위한 엔코더, 기구물들이 회전력을 버티게 하기 위한 크로스롤러 베어링.
그리고 제어 기판 등등.. 대략 이런 기구물들이 각 축마다 부착되어 있다고 보시면 됩니다.
모터와 감속기와 엔코더와 베어링과 제어기판 등등 축을 구동시키기 위해 필요한 많은 요소들을 하나의 모듈로 결합한 스마트 액츄에이터가 협동로봇의 기구부 구성에서는 매우 핵심적인 역할을 합니다.
아직까지도 구동부는 대부분 수입에 의존하고 있지만 내수화를 하기 위한 자체개발 시도가 많아지고 있습니다.
이 부분은 나중에 따로 자세히 다루면 좋을 것 같네요.

앞에서 액츄에이터라는 단어가 나왔는데, 액츄에이터라는 것은 전기적인 신호 혹은 유압, 공압 등의 어떠한 에너지원을 이용하여 직선운동과 회전운동을 만들어내는 기계장치 입니다.
일반적으로 모터가 가장 많이 쓰이는 구조이구요, 지금 제 눈앞에는 선풍기가 보이는데 선풍기 또한 모터의 회전력을 이용하여 날개를 회전시켜 바람을 만들어내는 기계입니다.
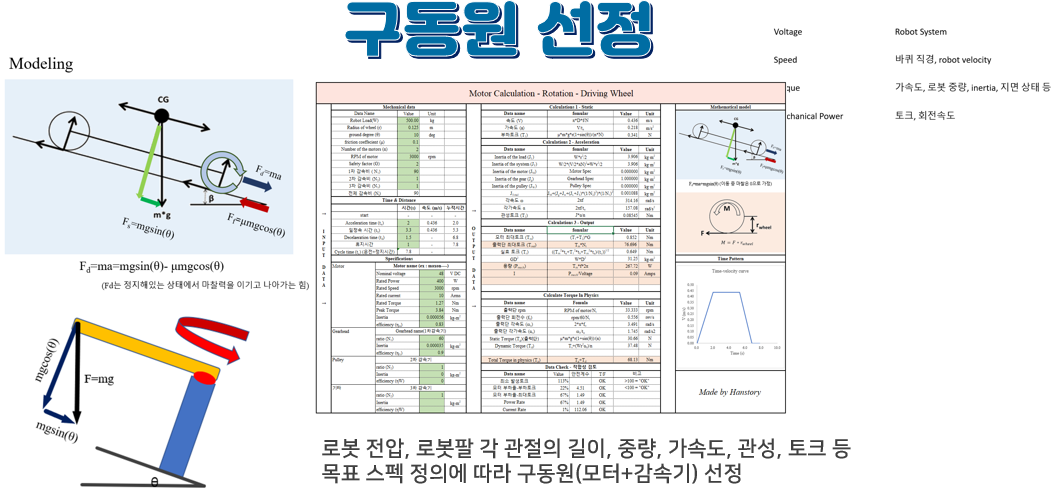
액츄에이터를 어떤 것을 쓰는지 부터가 협동로봇의 기구물에 정말정말 큰 역할을 하는데요,
그 이유는 액츄에이터를 어떻게 사용하느냐에 따라 로봇의 전체 크기와 무게가 모두 달라지기 때문입니다.
예를 들어볼게요.

왼쪽 사진에서처럼 6개의 회전축을 가진 협동로봇이 있고, 이 협동로봇은 5kg의 페이로드를 가진다고 가정해 봅니다.
5kg 페이로드가 의미하는 것은 왼쪽 사진에서 J6 축에 최대 5kg의 물건까지 로봇이 들어올릴 수 있다는 것입니다.
그렇다면 J6 을 회전시키기 위해서 J6 내부에는 5kg을 들 수 있는 수준의 모터를 부착해야 합니다.
그리고 J5에는 5kg+ J6 기구물의 무게를 들 수 있는 모터.
그렇게 하다보면 맨 마지막 J1에는 이 전체를 들고 회전시킬 수 있는 수준의 모터를 부착해야 하는데, 당연히 J1을 구동시키기 위한 모터가 J6을 구동시키기 위한 모터보다 크고 무겁고 비쌉니다.
이 구성을 어떻게 하느냐에 따라 전체적인 크기와 무게와 비용에 크게 영향을 받을 수 밖에 없죠.
따라서 앞서 말씀드린 스마트액츄에이터 기술이 정말 핵심기술일 수 밖에 없습니다.
모터 보조장치
협동로봇 내부 기구물에서는 모터가 정말 핵심이라고 말씀드렸습니다.
모터의 크기를 더 작은것을 써서 로봇 전체 크기와 무게를 줄일 수 있게 하기 위해서도 여러가지 장치들이 추가로 설계되는데, 가장 첫번째가 감속기 입니다.

간단히 말하면 모터의 속력을 줄이는 대신 모터의 힘을 키우는 개념이 바로 감속기 입니다.
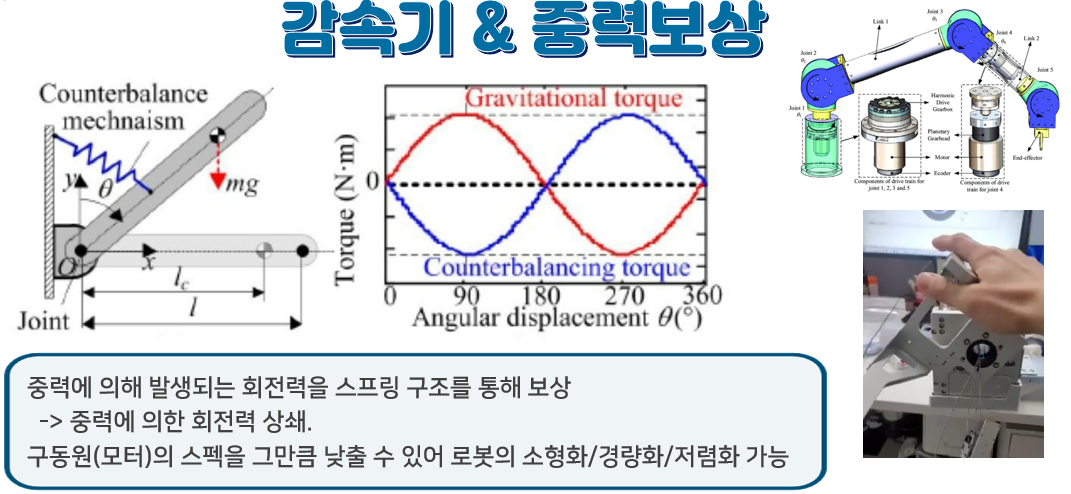
또한 중력보상이라는 개념이 있습니다.
이것은, 로봇팔이 중력에 의해 처지는 현상을 기구적으로 막아줌으로써 그만큼 더 작은 모터를 사용할 수 있는 개념인데
중력보상 장치가 적용된 로봇도 있고 그렇지 않은 로봇도 있습니다.
아마 앞으로는 점점 중력보상이 적용된 로봇이 많아지지 않을까 생각해 봅니다..
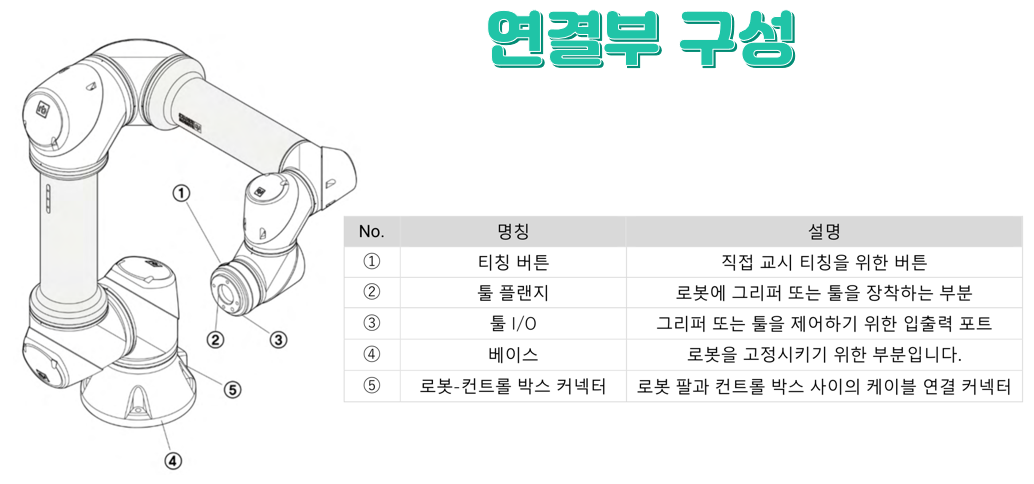
3. Gripper

로봇팔과 컨트롤러만 있다고 협동로봇의 구성이 끝나지 않습니다.
로봇팔의 끝에 그리퍼가 달려있어야 그 그리퍼를 이용해서 무언가를 집거나 어떤 행동을 할 수 있게 되는 것이죠.
그러니까 그리퍼라는 것은 결국 로봇이 최종적으로 어떤 물건을 잡기 위해 로봇 끝에 부착되는, 사람으로 말하면 팔에 붙어있는 손과 같은 역할을 합니다.
그리퍼는 공압을 이용하여 물체를 들어올리는 Vacuum gripper, 2개 혹은 3개의 손가락을 이용하여 물체를 집는 그리퍼.
그 외에도 자석을 활용한다거나 손가락 관절을 모사하는 등 다양한 그리퍼들이 개발되고 있습니다.
아무래도 목표로 하는 대상물체에 따라 그리퍼의 형상이 계속 달라져야 하다 보니, 최근에는 하나의 그리퍼를 통해 최대한 다양한 물체를 한번에 잡을 수 있도록 만능 그리퍼가 고안되고 있지만 아직 상용화는 어려운 듯 하고..
체감 상으로는 공압 그리퍼를 제일 많이 사용하는 추세인 듯 합니다.
현대 산업분야에서 협동로봇의 중요성은 점점 커지고 있습니다.
커피로봇과 치킨 튀기는 로봇은 그 시작일 뿐, 로봇으로 할 수 있는 영역은 점점 더 방대해 질 것이며
멀지않은 미래에는 한 곳에 고정되어있지 않은 로봇 팔이 자유롭게 이동하며 택배도 나르고 청소도 하고
테이블 서빙도 하는 그런 날이 오지 않을까요?
여기까지, 협동로봇의 하드웨어 구성에 대해 알아보았습니다.
로봇의 기구설계에 대해 조금 더 알아보고 싶거나 현업에서 일하면서 혹은 대학에서 공부를 하면서
같은 분야의 사람들과 소소하게 대화도 나누고 서로 질문도 하고싶으신 분은
아래 링크의 대화방에 들어와서 같이 이야기 나누어 보아요
https://open.kakao.com/o/gfzL3j3e
기구설계 로봇공학 커뮤니티
open.kakao.com
'로봇스토리' 카테고리의 다른 글
| 국내 협동로봇 기업 탐구 #1 (48) | 2023.11.01 |
|---|---|
| 3D 프린터의 방식과 활용성 (66) | 2023.10.24 |
| 초등학생도 가능한 아두이노 로봇 만들기 +코딩 교육 (1) | 2023.10.15 |
| IOT 개념정리 및 활용성에 대하여 (0) | 2023.08.15 |
| 스마트 팩토리에 대한 쌩 기초 다지기 (0) | 2023.07.24 |



