산업용 로봇에 대하여 정리하면서 공부해보려 합니다.
기본적으로 산업용 로봇은 어떤 종류가 있는지. 어느 분야에서 어떻게 사용되고있는지를 정리해보고,
협동로봇과 관련하여 향후 로봇산업은 어떤 식으로 흘러가게 될 것인지 등등
다양한 기술들을 계속 공부하며 로봇에 대한 전반적인 배경지식을 키우는 데 목표를 두겠습니다.
산업용 로봇의 이해 #1
로봇이란?
- 로봇이란, 프로그래밍된 다양한 지시에 따라 여러가지 일들을 수행하는 조작기
- 인격을 갖고있지 않는 기계로, 사람에 의해 프로그램된 후 명령에 따라 스스로 동작하는 기계
산업용 로봇의 정의
- 산업용 로봇은 일반적으로 위험하거나 사람이 수행하기 어려운 작업을 수행하도록 설계된 로봇.
- 일반적으로 공장이나 제조공정에서 사용되며, 자동화 및 생산성 향상을 위해 사용됨.
- 인간의 작업을 옆에서 협조하는 작업을 수행
- 작업의 정밀도, 품질, 생산 공정의 생산성을 증대시키는 목적을 가짐
이러한 산업용 로봇에는 다음과 같은 항목들이 요구됩니다.
1. 안정성 : 로봇이 인간과 함께 작업할 때 안전성이 보장되어야 함. 이를 위해 로봇은 안전 기능을 포함한 설계가 진행되어야 하며 안전 기능에는 충돌 감지센서나 속도 제한장치, 터치패드 등의 장착이 있음
2. 정확성 : 산업용 로봇은 반복적인 작업을 정확하게 수행해야 함. 따라서 로봇이 잘못된 위치로 이동하거나 부품을 잘못 조립하지 않도록 정확한 위치 및 각도 정보를 제공하는 정밀한 제어 시스템을 필요로 함.
3. 신뢰성 : 산업용 로봇은 매우 긴 작업시간동안 연속적으로 작동할 수 있어야 한다. 즉 내구성과 유지보수가 용이해야 함.
4. 생산성 : 산업용 로봇은 생산성을 향상시키는 데 중요한 역할을 함. 즉, 로봇은 빠르게 작업하고 대량의 생산을 수행할 수 있어야 하며, 작업 환경에 따라 로봇의 속도와 작업능력을 조정할 수 있어야 한다.
5. 프로그래밍의 용이성 : 산업용 로봇은 사용자가 쉽게 프로그래밍할 수 있어야 함. 또한 상황에 맞게 프로그래밍은 변경이 가능해야 한다. 이를 위해 로봇 제조업체는 사용자에게 로봇 제어에 필요한 소프트웨어 및 하드웨어 툴을 제공하며 교육 프로그램까지 지원하는 것이 일반적임.
참고로 로봇이라는 용어는 1922년 체코슬라바키아의 극작가 '카렐 차페크'가 쓴 희곡에서 강제노역을 의미하는 'robota'에서 유래하였습니다. 이후 1961년 미국에서 최초의 산업용 로봇 Unimate가 실용화되었고 한국에서의 상업적 로봇회사는 1980년대 중반에 들어서 활성화되기 시작합니다.
구조적 동작 특성에 따른 로봇의 분류
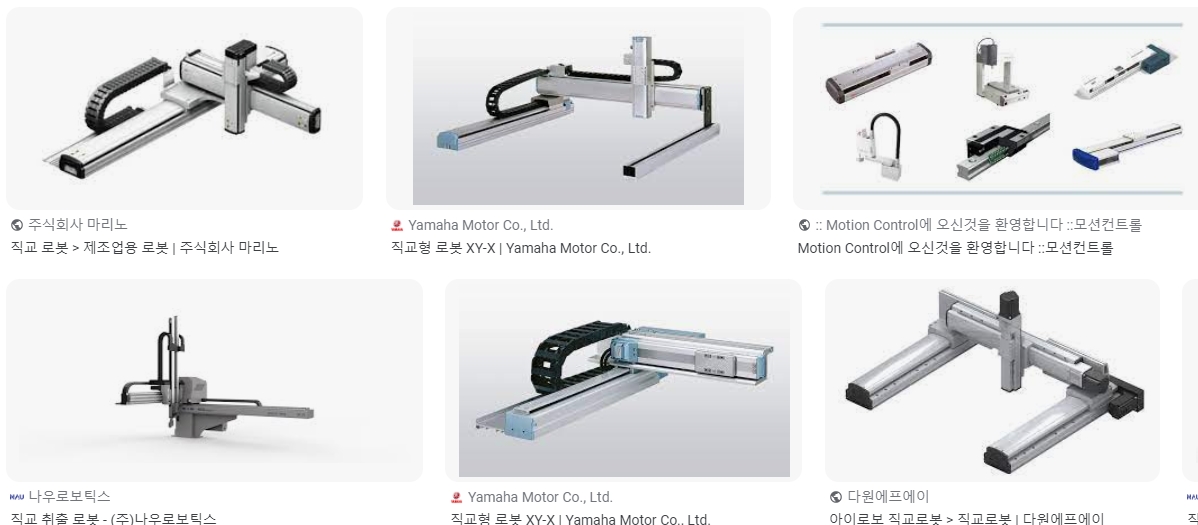
1. 직교좌표 로봇
: x,y,z 축으로 이루어진 직교좌표계를 이용하여 작업을 수행하는 로봇.
다양한 제조작업, 검사, 조립 등의 과정에서 사용됨.
일반적으로 수평 작업 표면 위에서 작업을 수행하며 고속 및 고정밀 작업에 적합
동작 영역에 비해 설치 면적이 큰 것이 단점
2. 원통좌표로봇
- 원통을 중심으로 회전이 가능한 로봇
- 설치면적이 작다는 장점이 있으나 작업물이 무거우면 정밀도가 떨어지는 단점이 있음

(예시 사진이 적절하진 않지만..)
3. 극좌표 로봇
- x,y,z 축 대신 극좌표계를 사용하여 작업을 수행하며, 기준 축으로부터 거리와 방향에 대한 값을 사용하여 작업 수행
- 수직면에 대하여 상하운동 특성이 우수.
- 작업영역이 넓고 경사진 위치에서 작업을 수행
- 용접 작업이나 도장 작업에 적합
- 직교좌표로봇보다 비용이 많이 들며 작업속도는 더 느리지만 더 정밀한 작업 수행 가능

4. 수평다관절로봇 (스카라 로봇)
- 수평면상의 운동 특성을 가지고 있어 조립작업 또는 Palletizing 작업에 적합

5. 수직다관절 로봇
- 일반적으로 가장 많이 사용되는 로봇.
- 6개의 자유도를 가지고 있어 임의의 작업이 용이하고 속도가 빠르며 공간 활용이 우수

6. 협동로봇
- 작업자에게 위협이 되지 않는 로봇으로 작업자의 반복적인 동작이나 부적절한 자세로 인한 비 효율성에 대한 해결책.
- 작업자가 보다 효율적으로 작업할 수 있도록 협조하는 로봇

그 밖에 의료용 로봇(재활, 수술로봇 포함), 도장용 로봇, 소형 고속핸들링 로봇, LCD 로봇, 병렬 링크형 로봇 등 다양한 형태의 로봇이 존재합니다.
다음 포스팅에서는 로봇의 주요 구성요소와 적용되는 분야에 대해서 작성하도록 하겠습니다.
'로봇스토리' 카테고리의 다른 글
| 초등학생도 가능한 아두이노 로봇 만들기 +코딩 교육 (1) | 2023.10.15 |
|---|---|
| IOT 개념정리 및 활용성에 대하여 (0) | 2023.08.15 |
| 스마트 팩토리에 대한 쌩 기초 다지기 (0) | 2023.07.24 |
| 산업용 로봇 시장, 그리고 한국 (0) | 2023.03.28 |
| 완전 처음 시작하는 산업용 로봇의 이해#2 (0) | 2023.02.21 |



